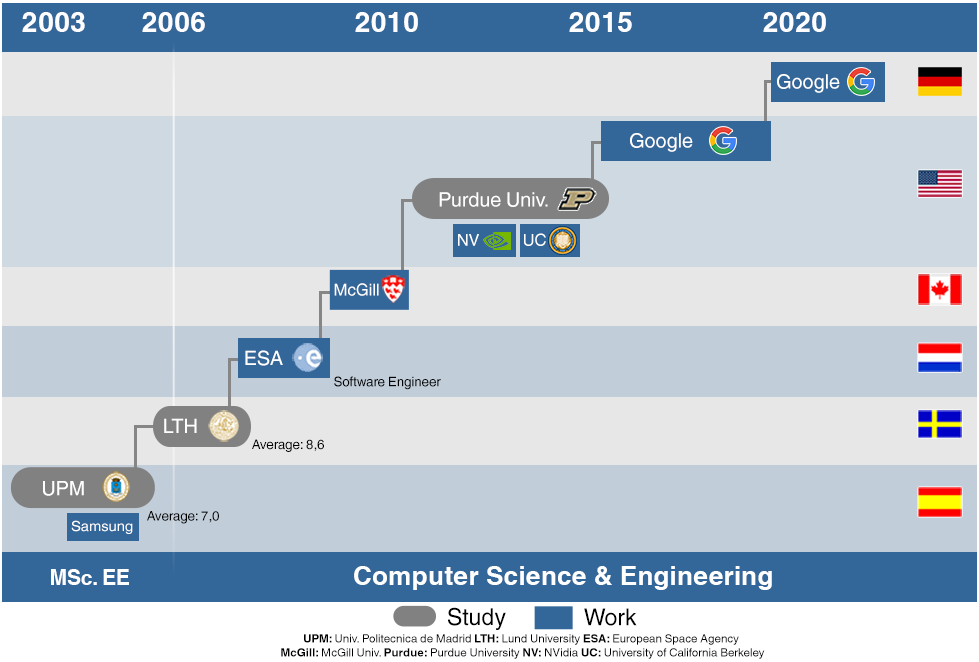
Ignacio Garcia-Dorado is currently working at Google Research as December 2015.
He received his Ph.D. in the Department of Computer Science at Purdue University, USA. He worked as a research assistant under the supervision of Professor D. Aliaga,
focusing on inverse procedural modeling, 3D urban reconstruction, and human vision.
He also holds M.S. degrees in Electrical Engineering (UPM, Spain, 2008); Computer Engineering (LTH, Sweden, 2008); and Computer Science (Purdue University, USA, 2014).
From 2008 to 2010, Ignacio worked at the ESA as a Computer Engineer in Noordwijk, The Netherlands. From January to May 2010, he worked as a Research Assistant at McGill University, Canada. After this, he was awarded a Fulbright Scholarship to initiate Ph.D. studies at Purdue University.
During his Ph.D. at Purdue, he worked as a Research Intern at NVidia during the Summer of 2013 and as a Research Assistant at U.C. Berkeley during the Summer of 2014. After his Ph.D. defense on Octuber 2015, he moved to Mountain View to work in the Computational Photography team at Google Research.
⇩